
spharpy.transforms#
Rotation for data in the spherical harmonic domain. Please refer to the Spherical Harmonic Definitions page for background information on spherical harmonics.
Classes:
|
Class for rotations of coordinates and spherical harmonic expansions. |
Functions:
|
Rotation matrix for complex spherical harmonics around the z-axis by a given angle. |
|
Rotation matrix for real-valued spherical harmonics around the z-axis by a given angle. |
|
Wigner-d function for rotations around the y-axis. |
|
Wigner-D rotation matrix for Euler rotations by angles (alpha, beta, gamma) around the (z,y,z)-axes. |
|
Wigner-D rotation matrix for Euler rotations for real-valued spherical harmonics by angles (alpha, beta, gamma) around the (z,y,z)-axes. |
- class spharpy.transforms.SphericalHarmonicRotation(quat, *args, **kwargs)[source]#
Bases:
RotationClass for rotations of coordinates and spherical harmonic expansions.
The class extends the
scipy.spatial.transform.Rotationclass and provides methods to express the rotation as spherical harmonic rotation matrices as well as to apply the rotation to spherical harmonic data objects. The spherical harmonic rotation matrices are computed based on the Wigner-D functions as described in [1] and [2] for complex and real-valued spherical harmonics, respectively.To create a rotation object, use one of the available
from_*methods, e.g.,scipy.spatial.transform.Rotation.from_eulerorscipy.spatial.transform.Rotation.from_quatfor creation using Euler angles or quaternions, respectively. Also see the examples below.Examples
The following examples demonstrate how to create a rotation and apply it to spherical harmonic coefficients and corresponding spherical harmonic data containers using the implemented methods and operators.
>>> import numpy as np >>> import matplotlib.pyplot as plt >>> import spharpy
Define the convention and order of the spherical harmonics and a set of coefficients. Note that the generated coefficients correspond to a dipole oriented along the y-axis.
>>> definition = spharpy.SphericalHarmonicDefinition(n_max=1) >>> coefficients = np.array([0, 1, 0, 0])
Define a rotation by 45 degrees around the z-axis based on the Euler angles.
>>> angle = np.pi / 4 >>> R = spharpy.transforms.SphericalHarmonicRotation.from_euler( >>> 'z', angle)
The spherical harmonic rotation matrix can be obtained and applied to the spherical harmonic coefficients using the following:
>>> D = R.as_spherical_harmonic_matrix(definition) >>> rotated_coefficients = D @ coefficients >>> print(f"Rotated coefficients: {np.round(rotated_coefficients, 2)}") ... # Rotated coefficients: [ 0. 0.71 0. -0.71]
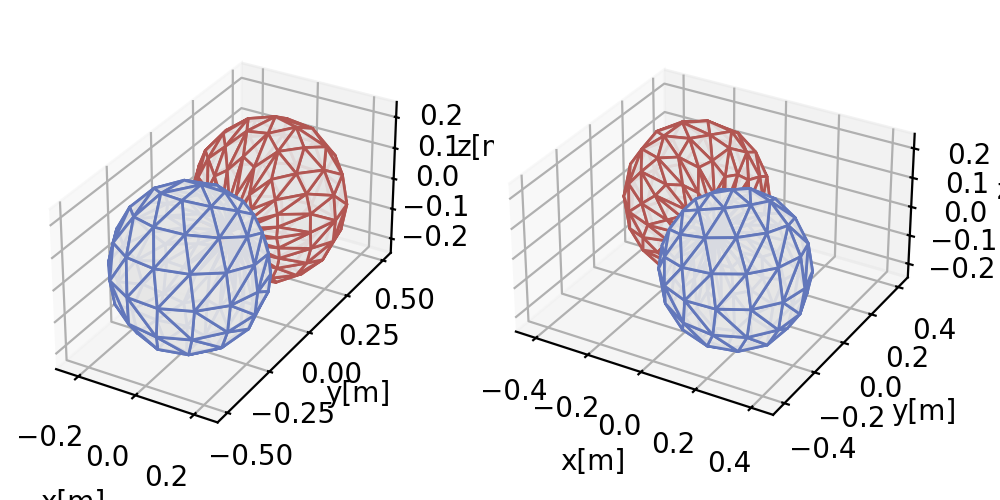
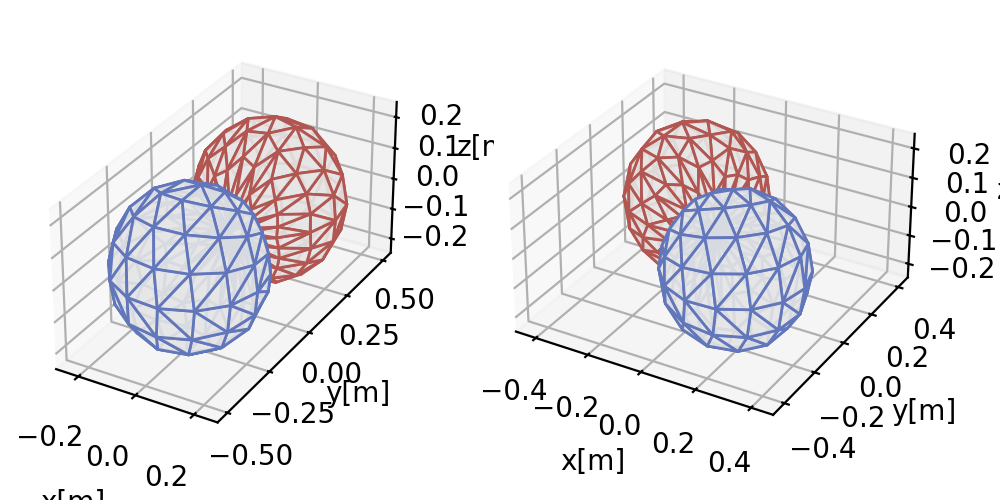
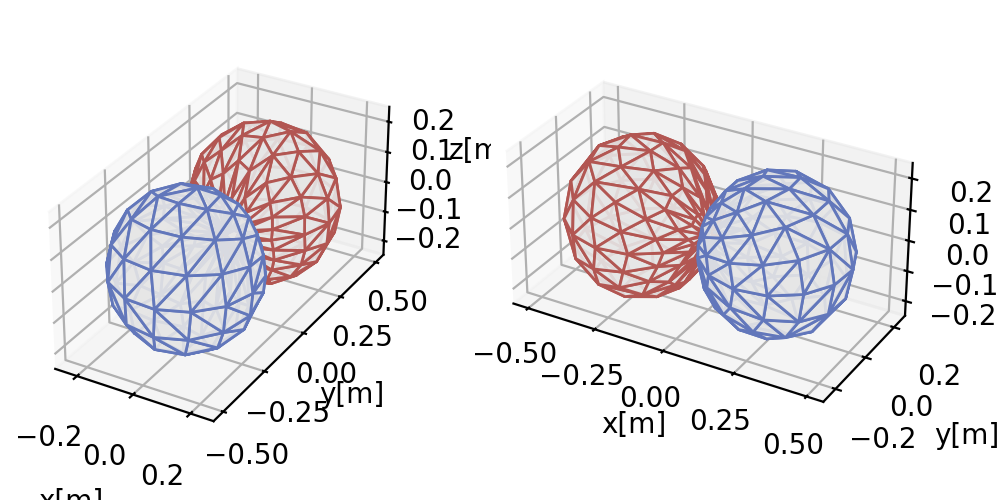
To visualize the effect of the rotation, we can expand the series expansion on the unit sphere and plot the original and rotated data:
>>> sampling = spharpy.samplings.equal_area(0, n_points=250) >>> Y = spharpy.SphericalHarmonics.from_definition( >>> definition, coordinates=sampling) ... >>> _, axs = plt.subplots( >>> 1, 2, subplot_kw={'projection': '3d'}, figsize=(5, 2.5), >>> layout='constrained') >>> spharpy.plot.balloon_wireframe( >>> sampling, Y.basis @ coefficients, ax=axs[0], colorbar=False) >>> spharpy.plot.balloon_wireframe( >>> sampling, Y.basis @ rotated_coefficients, ax=axs[1], >>> colorbar=False)
(
Source code,png,hires.png,pdf)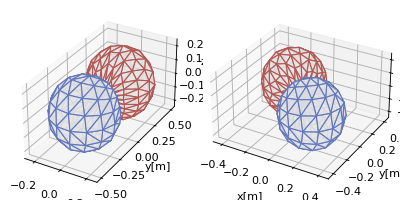
The rotation can also be applied to spherical harmonic data objects using the overloaded multiplication operator. This includes the class object itself as well as
SphericalHarmonicFrequencyData,SphericalHarmonicTimeData, andSphericalHarmonicSignal.The following example demonstrates the application to an arbitrary
SphericalHarmonicFrequencyDataobject containing the same series expansion in frequency_data.freq as above:>>> frequency_data = spharpy.SphericalHarmonicFrequencyData( >>> np.atleast_2d(coefficients).T, frequencies=1e3, >>> basis_type=definition.basis_type, >>> normalization=definition.normalization, >>> channel_convention=definition.channel_convention, >>> condon_shortley=definition.condon_shortley)
The rotation can now be applied using the apply method
>>> rotated_frequency_data = R.apply(frequency_data)
or the * operator
>>> rotated_frequency_data = R * frequency_data
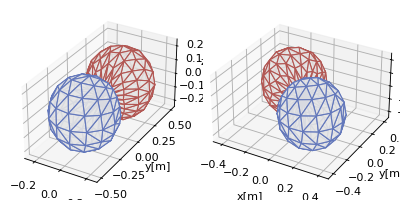
The effect of the rotation can again be visualized by evaluating the series expansion on the unit sphere:
>>> _, axs = plt.subplots( >>> 1, 2, subplot_kw={'projection': '3d'}, figsize=(5, 2.5), >>> layout='constrained') >>> spharpy.plot.balloon_wireframe( >>> sampling, np.squeeze(Y.basis @ frequency_data.freq), >>> ax=axs[0], colorbar=False) >>> spharpy.plot.balloon_wireframe( >>> sampling, np.squeeze(Y.basis @ rotated_frequency_data.freq), >>> ax=axs[1], colorbar=False)
(
Source code,png,hires.png,pdf)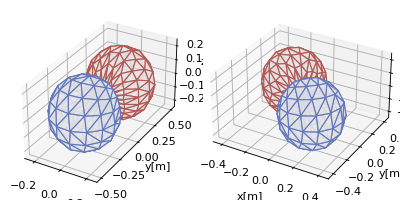
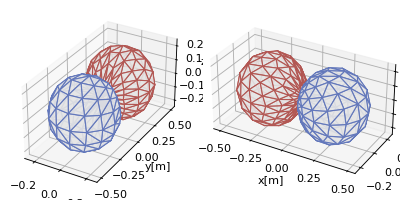
Multiple rotations can be combined by multiplying the respective
SphericalHarmonicRotationobjects.>>> rotated_frequency_data = R * R * frequency_data
This corresponds to a rotation of 90 degrees around the z-axis.
>>> _, axs = plt.subplots( >>> 1, 2, subplot_kw={'projection': '3d'}, figsize=(5, 2.5), >>> layout='constrained') >>> spharpy.plot.balloon_wireframe( >>> sampling, np.squeeze(Y.basis @ frequency_data.freq), >>> ax=axs[0], colorbar=False) >>> spharpy.plot.balloon_wireframe( >>> sampling, np.squeeze(Y.basis @ rotated_frequency_data.freq), >>> ax=axs[1], colorbar=False)
(
Source code,png,hires.png,pdf)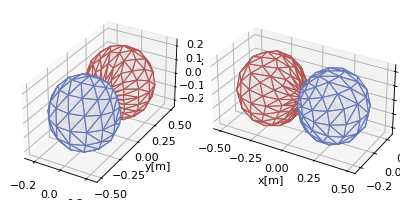
Note
Currently, only spherical harmonic rotations matrices following the
ACNindexing andN3Dnormalization are supported.References
Methods:
apply(target)Apply the rotation to spherical harmonic data object.
Express the rotation as spherical harmonic rotation matrices.
- apply(target: SphericalHarmonicTimeData | SphericalHarmonicFrequencyData | SphericalHarmonicSignal) SphericalHarmonicTimeData | SphericalHarmonicFrequencyData | SphericalHarmonicSignal[source]#
Apply the rotation to spherical harmonic data object.
Note that the spherical harmonic definition of the target object is used to generate a fitting spherical harmonic rotation matrix.
- Parameters:
target (SphericalHarmonicTimeData, SphericalHarmonicFrequencyData, SphericalHarmonicSignal) – Spherical harmonic series expansion to be rotated.
- Returns:
The rotated signal.
- Return type:
SphericalHarmonicTimeData, SphericalHarmonicFrequencyData, SphericalHarmonicSignal
- as_spherical_harmonic_matrix(spherical_harmonic_definition: SphericalHarmonicDefinition) ndarray[source]#
Express the rotation as spherical harmonic rotation matrices.
Supports complex and real-valued spherical harmonics.
- Parameters:
spherical_harmonic_definition (SphericalHarmonicDefinition) – Definition of the spherical harmonics.
- Returns:
Stack of block-diagonal rotation matrices with individual shapes \([(n_{max}+1)^2, (n_{max}+1)^2]\).
- Return type:
np.ndarray, complex or float
Note
At the moment, only spherical harmonic rotations matrices following the
ACNindexing andN3Dnormalization are supported.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- spharpy.transforms.rotation_z_axis(n_max, angle)[source]#
Rotation matrix for complex spherical harmonics around the z-axis by a given angle. The rotation is performed such that positive angles result in a counter clockwise rotation of the data [3].
\[c_{nm}(\theta, \phi + \xi) = e^{-im\xi} c_{nm}(\theta, \phi)\]- Parameters:
n_max (integer) – Spherical harmonic order
angle (number) – Rotation angle in radians [0, 2 \pi]
- Returns:
Diagonal rotation matrix evaluated for the specified angle
- Return type:
array_like, complex, shape \(((n_{max}+1)^2, (n_{max}+1)^2)\)
References
Examples
>>> import numpy as np >>> import spharpy >>> n_max = 1 >>> sh_vec = np.array([0, 1, 0, 0]) >>> rotMat = spharpy.transforms.rotation_z_axis(n_max, np.pi/2) >>> sh_vec_rotated = rotMat @ sh_vec
- spharpy.transforms.rotation_z_axis_real(n_max, angle)[source]#
Rotation matrix for real-valued spherical harmonics around the z-axis by a given angle. The rotation is performed such that positive angles result in a counter clockwise rotation of the data [4].
- Parameters:
n_max (integer) – Spherical harmonic order
angle (number) – Rotation angle in radians [0, 2 pi]
- Returns:
Block-diagonal Rotation matrix evaluated for the specified angle.
- Return type:
array_like, float, shape \(((n_max+1)^2, (n_max+1)^2)\)
References
Examples
>>> import numpy as np >>> import spharpy >>> n_max = 1 >>> sh_vec = np.array([0, 1, 0, 0]) >>> rotMat = spharpy.transforms.rotation_z_axis_real(n_max, np.pi/2) >>> sh_vec_rotated = rotMat @ sh_vec
- spharpy.transforms.wigner_d_function(n, m_dash, m, beta)[source]#
Wigner-d function for rotations around the y-axis. Convention as defined in [5].
- Parameters:
n (int) – order
m_dash (int) – degree
m (int) – degree
beta (float) – Rotation angle
- Returns:
Wigner-d symbol
- Return type:
float
References
- spharpy.transforms.wigner_d_rotation(n_max, alpha, beta, gamma)[source]#
Wigner-D rotation matrix for Euler rotations by angles (alpha, beta, gamma) around the (z,y,z)-axes. The implementation follows [6]. and rotation is performed such that positive angles result in a counter clockwise rotation of the data.
\[D_{m^\prime,m}^n(\alpha, \beta, \gamma) = e^{-im^\prime\alpha} d_{m^\prime,m}^n(\beta) e^{-im\gamma}\]- Parameters:
n_max (int) – Spherical harmonic order
alpha (float) – First z-axis rotation angle
beta (float) – Y-axis rotation angle
gamma (float) – Second z-axis rotation angle
- Returns:
Block diagonal rotation matrix
- Return type:
array_like, complex,:math:((n_max+1)^2, (n_max+1)^2)
Examples
>>> import numpy as np >>> import spharpy >>> n_max = 1 >>> sh_vec = np.array([0, 0, 1, 0]) >>> rotMat = spharpy.transforms.wigner_d_rotation(n_max, 0, np.pi/4, 0) >>> sh_vec_rotated = rotMat @ sh_vec
References
- spharpy.transforms.wigner_d_rotation_real(n_max, alpha, beta, gamma)[source]#
Wigner-D rotation matrix for Euler rotations for real-valued spherical harmonics by angles (alpha, beta, gamma) around the (z,y,z)-axes. The implementation follows [7] and the rotation is performed such that positive angles result in a counter clockwise rotation of the data.
- Parameters:
n_max (int) – Spherical harmonic order
alpha (float) – First z-axis rotation angle
beta (float) – Y-axis rotation angle
gamma (float) – Second z-axis rotation angle
- Returns:
Block diagonal rotation matrix
- Return type:
array_like, float, \(((n_max+1)^2, (n_max+1)^2)\)
Examples
>>> import numpy as np >>> import spharpy >>> n_max = 1 >>> sh_vec = np.array([0, 0, 1, 0]) >>> rotMat = spharpy.transforms.wigner_d_rotation_real( >>> n_max, 0, np.pi/4, 0) >>> sh_vec_rotated = rotMat @ sh_vec
References